
西门子G120变频器6SL3210-1KE17-5UP1




西门子G120变频器6SL3210-1KE17-5UP1
用于开发 S7-1500 软控制器和 S7-1500 增强型控制器 CPU 1518 MFP 以及 PLCSIM Advanced 的动态可加载函数库:通过语言 C/C++、C# 和 VB 实现在 Windows 系统中执行的 SIMATIC S7-1500 软控制器的函数库
通过语言 C/C++ 实现在 Windows 系统中执行的 PLCSIM Advanced 的函数库
通过语言 C++ 实现在 CPU 用户程序环境中实时执行的函数库
实现 CPU 1518 MFP 的 C++ 运行时应用程序
“Eclipse”开发环境用于供货范围内 CPU 用户程序中的实时函数库以及 C++ 运行时应用程序。
通过 MS Visual Studio 开发在 Windows 系统中执行的函数库
通过模板、使用基本项目,易于开发
自动创建用于调用库函数的函数块

通过导入,将函数块简便集成到 STEP 7 中。
无需专门的语言知识,即可在 PLC 中方便地使用库函数。

ODK 1500S 提供有一个浮动许可证。借助于该浮动许可证,可将该软件安装在任意多台 PC 上。现有许可证的数量决定可同时运行该软件的 PC 的数量。
ODK 1500S 的供货范围内包含开发实时库所需的集成开发环境 Eclipse 以及 Visual Studio 模块。
SIMATIC ODK 1500S 可作为独立产品提供,或者作为 SIMATIC Target 1500S™ for Simulink® 产品套件的一部分提供。
西门子MM440变频器6SE6440-2UD31-1CA1
G120抱闸功能
G120抱闸控制是变频器内部自带的专门用于控制电机抱闸逻辑功能,当驱动不激活时保持抱闸,用于防止驱动装置出现不希望的运动,例如位能性负载。
G120抱闸连接
抱闸连接有两种形式,一种是抱闸继电器连接控制;一种是CU控制单元DO连接控制;
抱闸继电器连接:
使用抱闸继电器控制,有两种型号的制动继电器,技术数据如图1-1所示
1. 制动继电器对电机抱闸进行控制
2. 安全制动继电器对电机抱闸控制,该方式只能控制24 V 电机抱闸,并监控短路或断线

图1-1 制动继电器技术数据
如图1-2、1-3所示,抱闸继电器是功率单元和电机抱闸线圈之间的接口,通过抱闸继电器自带的连接电缆将抱闸继电器和功率单元连在一起。抱闸继电器可以安装在安装板上、控制柜柜壁上、变频器的屏蔽连接板上。

图1-2 制动继电器控制接线图

图1-3 安全制动继电器控制接线图
制动继电器连接接口:
制动继电器的控制端子位于功率模块正面,如图1-4所示,在电缆进线位置中敷设用于制动继电器的成形电缆。
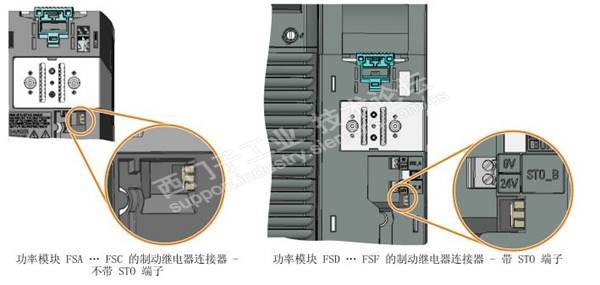
图1-4 制动继电器的控制端子位置
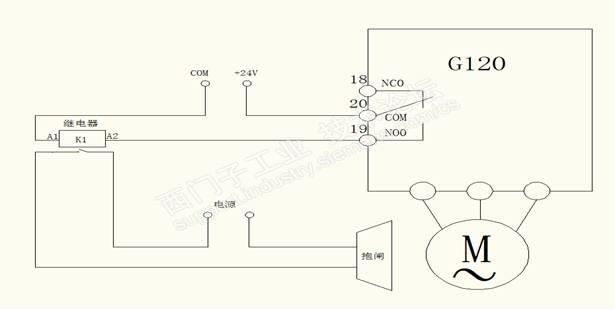
控制单元DO连接:
使用控制单元的DO数字量输出控制,通过数字量输出控制外部接触器或继电器,然后接触器或继电器的常开触点控制电机抱闸线圈,如图1-5所示。数字量输出通过内部BICO互连到抱闸状态位r899.12或r52.12来完成变频器内部抱闸逻辑的输出,如图1-6所示。
第三方设备大部分支持,西门子S7 PLC可以通过选择自由口通信模式控制串口通信。较简单的情况只用发送指令(XMT)向打印机或者变频器等第三方设备发送信息。不管任何情况,都**通过S7 PLC编写程序实现。当选择了自由口模式,用户可以通过发送指令(XMT)、接收指
(RCV) 、发送中断、接收中断来控制通信口的操作。
2、PPI通信
PPI协议是S7-200CPU较基本的通信方式,通过原来自身的端口(PORTO或PORT1))就可以实现通信,是S7-200 CPU默认的通信方式。PPI是一种主-从协议通信,主-从站在一个令牌环网中。在CPU内用户网络读写指令即可,也就是说网络读写指令是运行在PPI协议上的。因此 PPI只在主站侧编写程序就可以了,从站的网络读写指令没有什么意义。
3、MPI通信
MPI通信是一种比简单的通信方式,MPI网络通信的速率是19.2Kbit/s~12Mbit/s,MPI网络较多支持连接32个节点,较大通信距离为50M。通信
距离远,还可以通过中继器扩展通信距离,但中继器也占用节点。MPI网络节点通常可以挂S7-200、人机介面、编程设备等
特殊存储区位
SM0.0始终接通SM1.0操作结果= oSM0.1**扫描SM1.1溢出或非法数值SM0.2保持数据丢失SM1.2负数结果SM0.3上电 SM1.3除以0
SM0.4 30秒关断/30秒接通SM1.4表格已满SM0.5 0.5秒关断/0.5秒接通SM1.5表格为空
西门子G120变频器6SL3210-1KE17-5UP1
